ロボットの動力学、機構、アクチュエータと制御方法などを考えるとともに、簡単なプログラムを作り市販のティーチングプレイバック型ロボットを操作することで、ロボットに対する理解を深める。
B-2. ロボットの動力学モデル}
ロボットの運動をモデル化して論ずるとき、入力トルク(またはアクチュエータに加える電圧指令値)から関節の角度・角速度・角加速度を求める順動力学と、各関節の角度・角速度・角加速度が与えられたときの必要トルクを計算する逆動力学に分類できる。順動力学はシミュレーションで必要となるが、制御で必要となるのは逆動力学である。
一般にロボットの運動方程式は次式のように表すことができる。

式(11)の左辺の角度・角速度・角加速度が与えられたとき、右辺の必要トルクを計算するのが逆動力学問題である。
ここで
このように、ロボットは非線形なシステムであるが、逆動力学によって必要なトルクを求めればフィード・フォーワード補償が可能である。次式のように非線形特性を補償すると、

線形な状態方程式

で書き表すことができ、ロボットに線形制御理論を適用することが可能となる。
B-3. ロボットの機構}
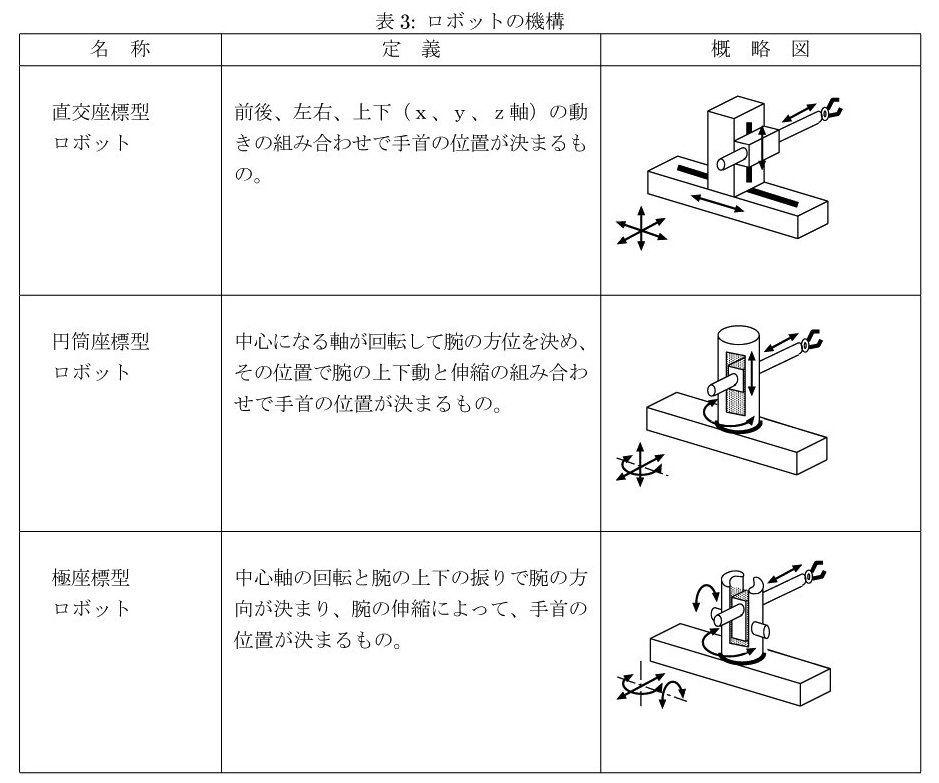
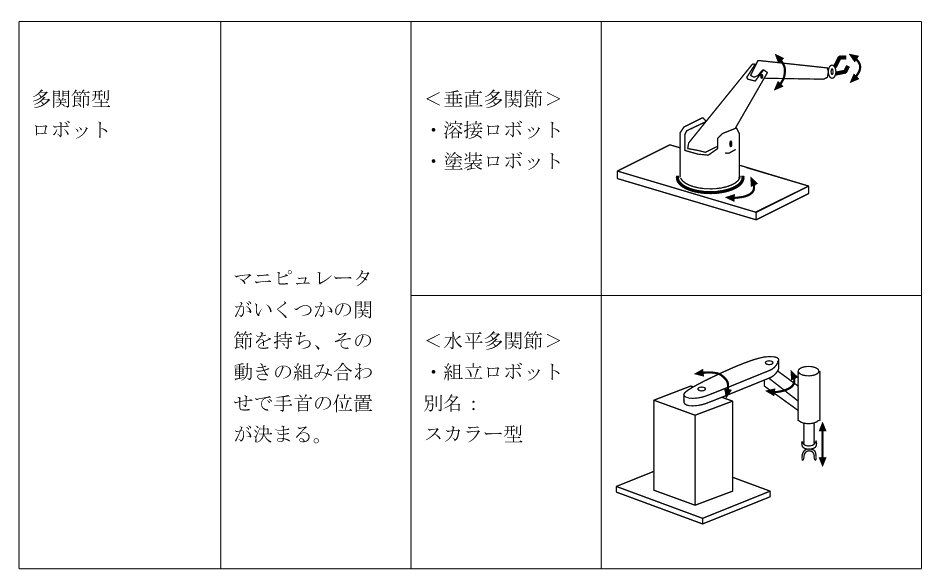
ロボットは自動機械の一種ではあるが、動作の自由度が極めて多く複雑な動作が可能であり、また動作がプログラマブルで目的に応じて設定変更が容易なことや、外界を認識するセンサと組み合わせることによりその変化に適応した動作が行えるといった特長を持っている。表3にロボットの基本的機構とその分類を示す。
B-4. サーボモータとロボットの制御方式}
逆動力学で得られた必要トルクを発生させるために、ロボットは通常サーボモータと呼ばれる制御用モータによって駆動される。サーボモータの呼び方を原理から分類すると表4のようになる。またその概要を図7に示す。


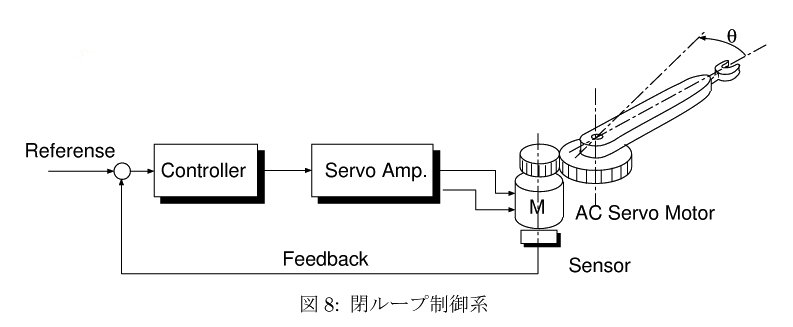
ロボットの制御方式としては、DCあるいはACサーボモータを使用し角度や角速度などの情報をフィードバックして制御を行う閉ループ制御方式と、ステッピングモータを用いることでフィードバックを必用としない開ループ制御方式に分けることができる。図8は最も単純な1自由度アームの閉ループ制御系を示す。閉ループ制御によって、高速高精度のサーボ系が作れるが、フィードバックによる安定性の問題が生じるため安定なコントローラの設計が重要である。またセンサやサーボアンプを必用とするため、高価なシステムになる。
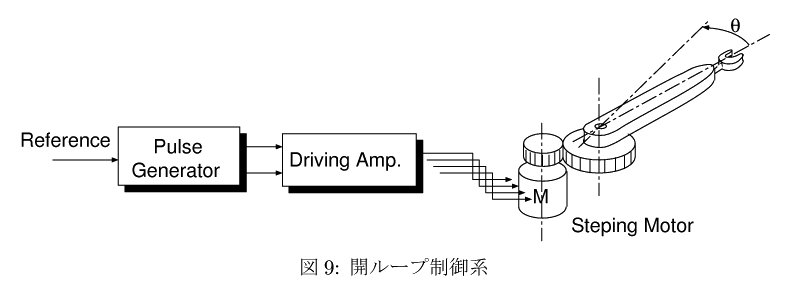
一方、図9のステッピングモータを用いた開ループ制御は、センサを必用とせず安価にシステムを構成できるが、高速高出力は無理であり、精度はモータのステップ角や減速器などシステム構成に依存する。
B-5. 産業用ロボットを用いた操作プログラム}
ロボットの動作の基準となるポイントを順番に指定していく方法を教示(ティーチング) という。あらかじめ人間が直接ロボットを動かして教示をしておき、その教示された情報に従って作業を行うのがプレイバックロボットである。ティーチングプレイバック方式は座標値等を気にせず対象物を使って直接教示できるため、産業用ロボットの教示方式として広く用いられている。
本実験では、水平多関節型(スカラー型)組立ロボットA4010を使い、ティーチングプレイバック方式によって実際にプログラムを作りその動作を確認する。