概要
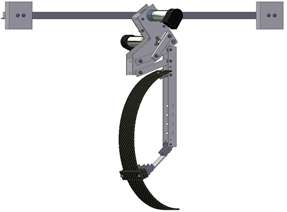
クランク機構によって脚を伸縮させることによって跳躍運動を行い、腰部を駆動することによって姿勢を安定化して走行する 跳躍ロボットを実現する。脚先はばねであり、着地時にエネルギーを蓄積することにより、効率的に走行することを目指す。 また、転倒せずに走行するための姿勢安定化制御方法を確立することを目的としている。

クランク機構によって脚を伸縮させることによって跳躍運動を行い、腰部を駆動することによって姿勢を安定化して走行する 跳躍ロボットを実現する。脚先はばねであり、着地時にエネルギーを蓄積することにより、効率的に走行することを目指す。 また、転倒せずに走行するための姿勢安定化制御方法を確立することを目的としている。