
生産技術工学分野
- 目次
- 水素を観る-水素社会実現に向けて- マイクロメディアを用いたELID鏡面研削加工技術 理論強度に向けた構造用金属材料の高強度化 高性能材料の特性評価と新材料開発 医用機械工学技術の創造と医学分野への応用 歯科インプラントのコーティング技術の開発 下肢障害者用脚支援システム 柔軟リンクロボットアームの制御
水素を観る-水素社会実現に向けて-
近年、地球温暖化等の環境問題からクリーンエネルギである「水素」を用いた水素社会の実現が期待されています。水素社会を実現するための問題の一つとして、水素が金属材料の中に侵入し、金属材料を脆くしてしまう「水素脆化」があります。しかし、この現象のメカニズムについては明らかになっていません。当研究室では、目に見えない水素を可視化し、調査していくことにより、水素脆化のメカニズムを解明、防止することを目的とした研究を主なテーマとして行っています。
_lab.jpg)
純アルミニウム中の水素の可視化例
マイクロメディアを用いたELID鏡面研削加工技術
微細固定砥粒による鏡面研削加工技術の一つとして、加工を行う際に砥石の表面を電解することで、目詰まりの無い、高効率・高品質な鏡面加工を行えるELID鏡面研削加工があります。本研究室では、ELID研削加工法をさらに発展させることを目的とし、ELID研削加工法の構成要素である砥石や、研削液などの研究を行っています。それらの研究結果を効果的に組み合わせることでELID研削加工技術をさらに発展させ、より実用的で、より高付加価値な技術を生みだし、これにより産業界に貢献し、社会を豊かにすることが、本研究室の目標です。
_lab1.jpg)
ELID研削加工法の原理
_lab2.jpg)
鏡面研削加工例
理論強度に向けた構造用金属材料の高強度化
世の中には様々な機械材料が存在し、それらを活用して色々な工業製品が設計され、私たちの暮らしに役立っています。社会のインフラに多用されている構造用金属材料は、それら機械材料の中で最も重要なものです。材料が高強度であれば、建築物等に必要な材料はより少なくて済み、また自動車等の移動体においては軽量化を通じて省エネルギー・運動性能の向上につながります。しかし、実用金属材料の強度は理論強度の2割にも満たない状態で使用されています。本研究室では、理論強度を目指した金属材料の高強度化に関する研究を進めています。
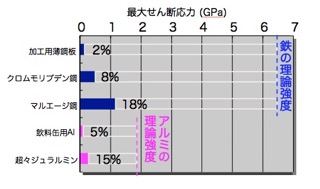
実用材料の強度と理論強度
(クリックして拡大)
高性能材料の特性評価と新材料開発
高性能を有する各種の構造機器の開発を目的に、各種材料の特性評価および新材料の開発を行っており、その例を下記に示します。
(1) 核融合炉用プラズマ対向材料の研究
銅とタングステンとの接合材料
(2) 燃料電池自動車用水素貯蔵タンク材料の研究
高強度アルミ合金
(3) 高温ガス冷却原子炉用およびロケット用炭素系材料の研究
微粒等方性黒鉛およびC/Cコンポ
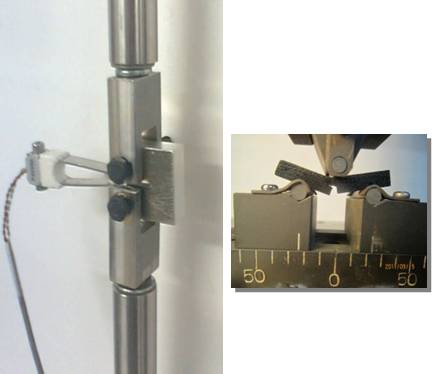
疲労試験や曲げ試験の様子
医用機械工学技術の創造と医学分野への応用
医学分野へ応用することを目的とした最新の医用機械工学技術を研究しています。人工心臓に使うための小型で省エネルギな磁気浮上モータの考案と、半永久的に壊れず心臓病患者の命を救う人工心臓の研究開発を主に行っています。その他にも細胞に超微小振動を加えることでその機能を制御する技術や、熱・圧力・振動からなる3つの低エネルギを加えることで組織へダメージを加えずに生体組織同士や生体組織と金属を接合する手術支援技術の研究開発も行っています。
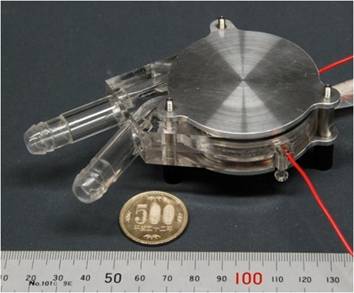
重症心不全患者を対象とした小型磁気浮上人工心臓
歯科インプラントのコーティング技術の開発
近年、歯が抜けた際の治療として、直接、顎の骨に埋め込む歯科インプラント治療が多く行われるようになりました。そのおかげで、普通の健康な歯と同じように物を噛むことができ、また見た目(審美性)が良くなりました。しかし、顎の骨量が足りなかったり、骨密度が低いと治療できないケースもあり、さらに骨と親和性の高い歯科インプラントが求められています。本研究では、骨の成分であるハイドロキシアパタイトという物質の薄膜を作製し、さらに他元素ドープするなどして、骨親和性に優れた膜の開発とコート技術の確立を目指しています。
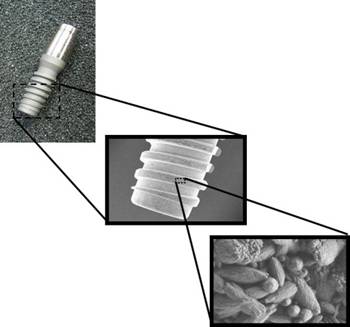
ハイドロキシアパタイトをコートした歯科インプラント表面
下肢障害者用脚支援システム
下半身麻痺などの障害者は、通常車椅子などを使って移動することが多いですが、自分の足で歩きたいという願望をお持ちだと思います。そこで、下肢麻痺がある脚に足首関節・膝関節・腰部関節をモータで駆動する装置を装着し、特殊なレバーによって手で脚の動作を指示することにより、脚を自在に操作し、歩行・階段昇降・椅子着席・起立などを可能にするための研究を行っています。

装着型脚支援システムManipuLeg
柔軟リンクロボットアームの制御
関節と関節をつなぐ部品(リンクといいます)が柔軟なロボットアームを動かすと、リンクが振動してしまい、ロボットの手足を狙った位置に素早く移動させることが難しくなります。このようなロボットはあまり役に立たないので敬遠されるところですが、諸事情により柔軟リンクにせざるを得ないことがあります。本研究では、リンクの振動を抑え、手先を目標位置へ素早く移動できる制御法を研究しています。数学を使って制御理論を導き、ロボット設計を工夫するなどして理論通りの制御を目指しています。
柔軟リンクロボットアーム